ワニ口クリップで外部の部品をピン(P0、P1、P2)につないで制御します。
| 命令の書き方 | 働き・説明 |
|---|---|
| 「P0」をマイクロビット端子入力モード設定 | 指定した端子(P0、P1、P2)を「入力(計測)」に使う準備をします。 |
| 「P0」をマイクロビット端子出力モード設定 | 指定した端子(P0、P1、P2)を「出力(制御)」に使う準備をします。 |
| 「P0」のマイクロビット端子デジタル入力 | 端子に電気が流れていれば 1、流れていなければ 0 を返します。 |
| 1023を「P0」へマイクロビット端子アナログ出力 | 指定した端子(P0、P1、P2)に電流を送ります。強さは0(弱い)〜1023(強い)で指定。 |
| 90を「P0」へマイクロビットサーボ出力 | 指定した端子(P0、P1、P2)につないだサーボモータを、指定した角度(この例では90度)に動かします。 |
| 説明 | つなぎ方の例 |
|---|---|
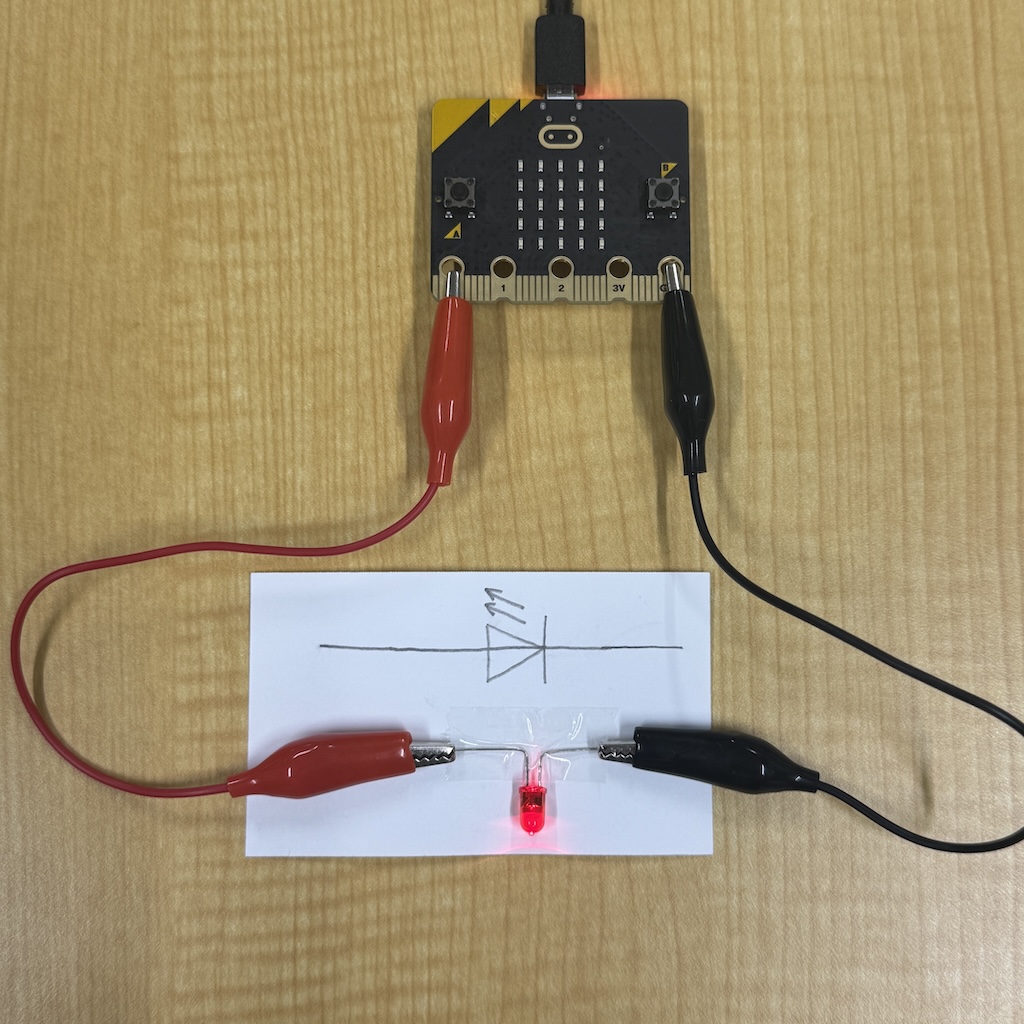
| P0端子(赤色)にLEDのアノードを,GND端子(黒色)にLEDのカソードをつないだ例 | |
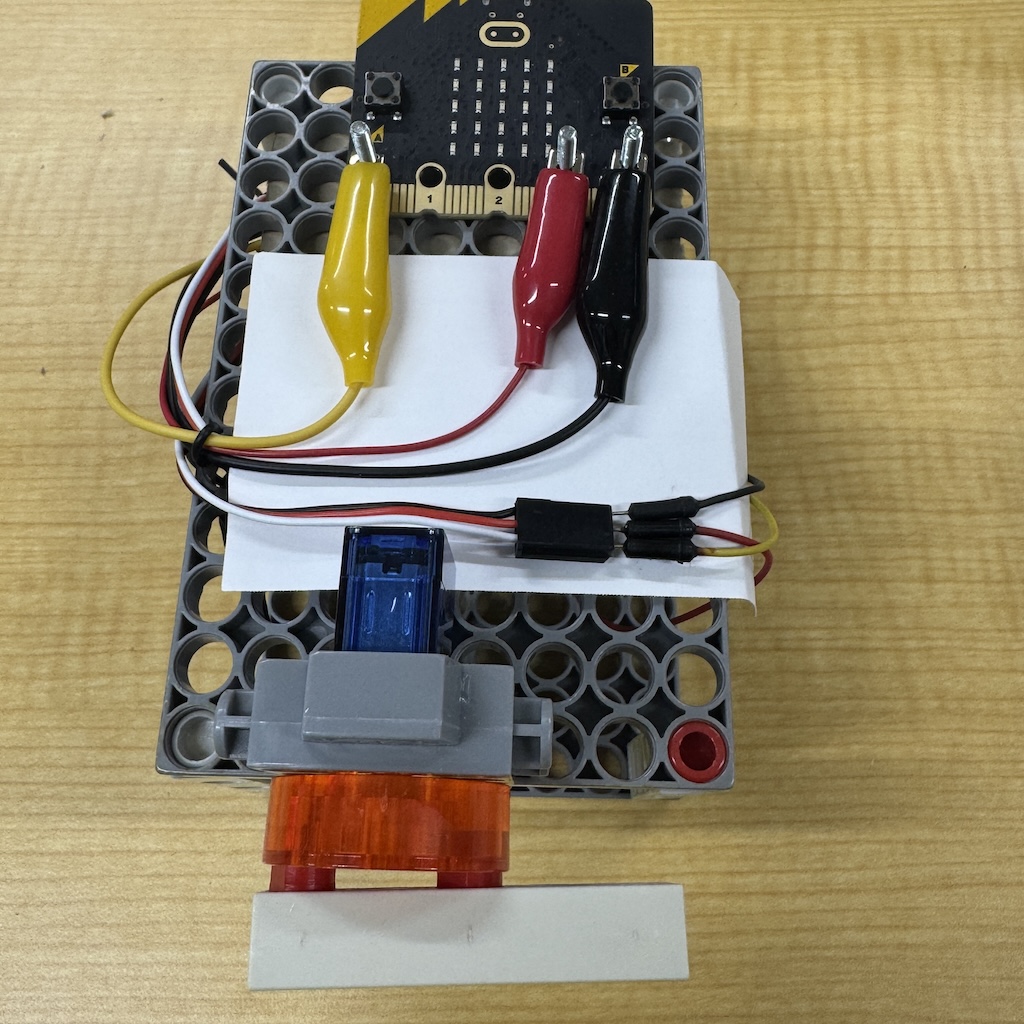
| P0端子(黄色)にサーボモータの白色を,3V端子(赤色)にサーボモータの赤色を,GND端子(黒色)にサーボモータの黒色をつないだ例 | |